Reactis V2018.2: Cumulative Coverage Tracking
|
|
Cumulative Coverage Tracking of Referenced Subsystems and Models
It is typical to implement functionality used multiple times within a model in a Simulink library or referenced model. Previously, if a model referenced a library subsystem or model multiple times, each instance had its own set of coverage targets. V2018.2 introduces a new cumulative coverage tracking feature that lets you specify that all instances of a referenced item should be tracked together.
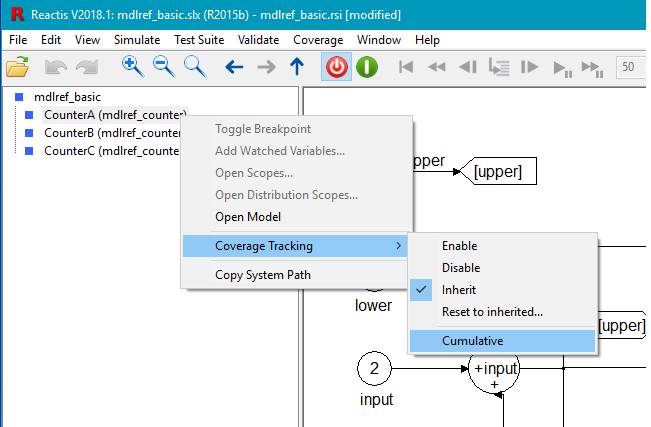
To select a library or model reference to be tracked cumulatively, load the parent model in Reactis and right-click on the referenced item in the hierarchy tree, then select Coverage Tracking > Cumulative:
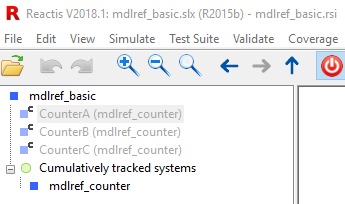
After that, all instances of the referenced item get grayed-out in the main hierarchy tree (as if coverage was disabled) and a new copy of the referenced item shows up in a Cumulatively tracked systems section:
If you now start Reactis Simulator, all data-specific interaction (hovering, watched variables) still happens in the same place as before (the instances of the referenced item) but coverage is shown cumulatively in the new copy listed in the Cumulatively tracked systems section.
Version Information in .rsi Files
The .rsi file is where Reactis stores the input port constraints and model-specific settings for a model. In V2018.2, Reactis now tracks the following version information for .rsi files:
- A revision number for the .rsi file that is increased automatically every time the .rsi file is modified and saved.
- The user name under which the last modification was made.
- The date of the last modification.
This information can be seen by selecting Edit > General in the Reactis GUI and can be queried using the rsRsiGetParameterValue() function in the API. The revision number is also included in test execution and coverage reports (next to the .rsi file name).
API
The following functions have been added to the Reactis API:
- rsRsiSetCumulativeCoverage: Enable/Disable cumulative coverage tracking for a referenced model or library subsystem.
- rsRsiIsCumulativeCoverage: Check cumulative coverage tracking status for a referenced model or library subsystem.
- rsRsiGetCumulativeCoverage: Query all systems/models for which cumulative coverage tracking is enabled.
Newly Supported Simulink Features
- MATLAB® R2018b
- Signals with greater than two dimensions in Simulink and Stateflow®.
- Input port setting for initial condition in Delay block.
- Matrices as initial conditions in Delay block.
- In Embedded MATLAB Plugin:
- Support type arguments to zero, one and eye functions.
- Support scalar expansion in .^ operator.
Reactis is a registered trademark of Reactive
Systems, Inc. MATLAB, Simulink, and Stateflow are registered trademarks
of The MathWorks, Inc.
Best Regards,
The Reactis Team