1. Introduction#
Reactis provides model-based testing and validation of discrete-time embedded-controller models in the Simulink / Stateflow notation developed by MathWorks. TargetLink is a code generator developed by dSPACE which has become popular due to the following reasons:
Its Simulink-compatible block set enables detailed specification of the C code attributes.
The C code generated by TargetLink is very high quality.
With proper configuration, Reactis can work with not only the TargetLink block set, but also with the C code generated by TargetLink. This provides many advantages:
Direct comparison between idealized-model behavior and realized C-code behavior.
Reactis test vectors derived for model-coverage can be used to analyze code coverage in the same environment. This can be extremely useful when looking at boundary or threshold conditions.
Interactive analysis using the full step-accurate debugging capability of Reactis.
A model-based design environment involving Reactis and TargetLink is depicted in Figure 1.1. Reactis contains three core components:
- Reactis Tester
offers automatic test generation from models
- Reactis Simulator
enables users to visualize model execution to debug models and track coverage
- Reactis Validator
offers automated checks of models for violations of user-specified requirements.
For more information on the basic capabilities of Reactis, please see Testing and Validation of Simulink Models with Reactis.
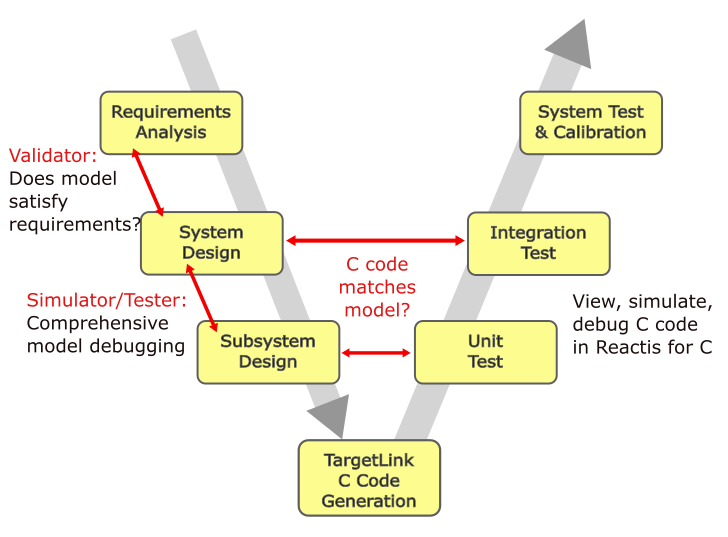
Fig. 1.1 Reactis in a model-based design process.#