2. An Overview of Reactis#
A model-based design environment involving Reactis, Simulink and Stateflow is depicted in Figure 2.1. Reactis contains three core components: Tester, which provides automated test generation from models; Simulator, which enables you to visualize model execution to debug models and track coverage; and Validator, which offers automated checks of Simulink models for violations of user-specified requirements. The remainder of this section describes these components in more detail.
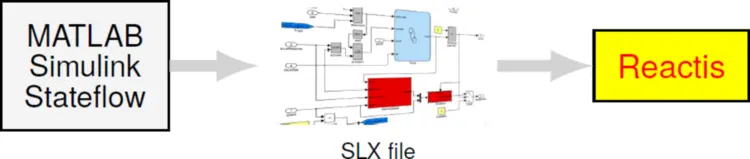
Fig. 2.1 Reactis is used in a model-based design process using Simulink/Stateflow models. Reactis is a standalone application that reads the .slx files produced by the MathWorks environment.#
2.1. Reactis Tester#
Figure 2.2 shows that Reactis Tester offers automatic test generation from Simulink models. The generated test suites provide comprehensive coverage of different test coverage metrics - including Modified Condition/Decision Coverage (MC/DC). MC/DC coverage is the test coverage measure mandated by the US Federal Aviation Administration (FAA) in its DO-178/C guidelines and by ISO 26262 for safety critical automotive software. The tests also aim to minimize redundancy in order to reduce the overall number of steps in a test suite. Each test case in a test suite consists of a sequence of inputs fed into the model as well as the responses to those inputs generated by the model.
The automatically generated test data may then be used for a variety of purposes, including the following:
- Implementation conformance
The tests may be applied to source-code implementations of models to ensure conformance with model behavior.
- Model testing and debugging
The tests may be run on the models themselves to detect runtime errors and to study and revise model behavior.
- Regression testing of models.
The tests may be run on a new version of a model to flag differing behaviors in the new version.
- Reverse engineering of models from source.
Tests may be generated from models derived from legacy code in order to check conformance between model and legacy code.
Reactis Tester enables engineers to maximize the effectiveness of testing while reducing the time actually spent on testing.
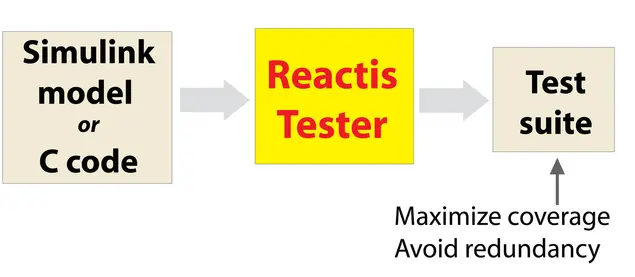
Fig. 2.2 Reactis Tester automatically generates comprehensive yet compact test suites.#
The structure of a Tester-generated test is shown in Figure 3. A test is constructed by simulating the model and capturing the top-level inputs and outputs. A test may be viewed as a matrix in which each row corresponds to either an inport or outport and each column represents a simulation step. A test suite consists of a set of tests. When running a test suite, the model is reset to its initial state after one test completes and before the next test begins.
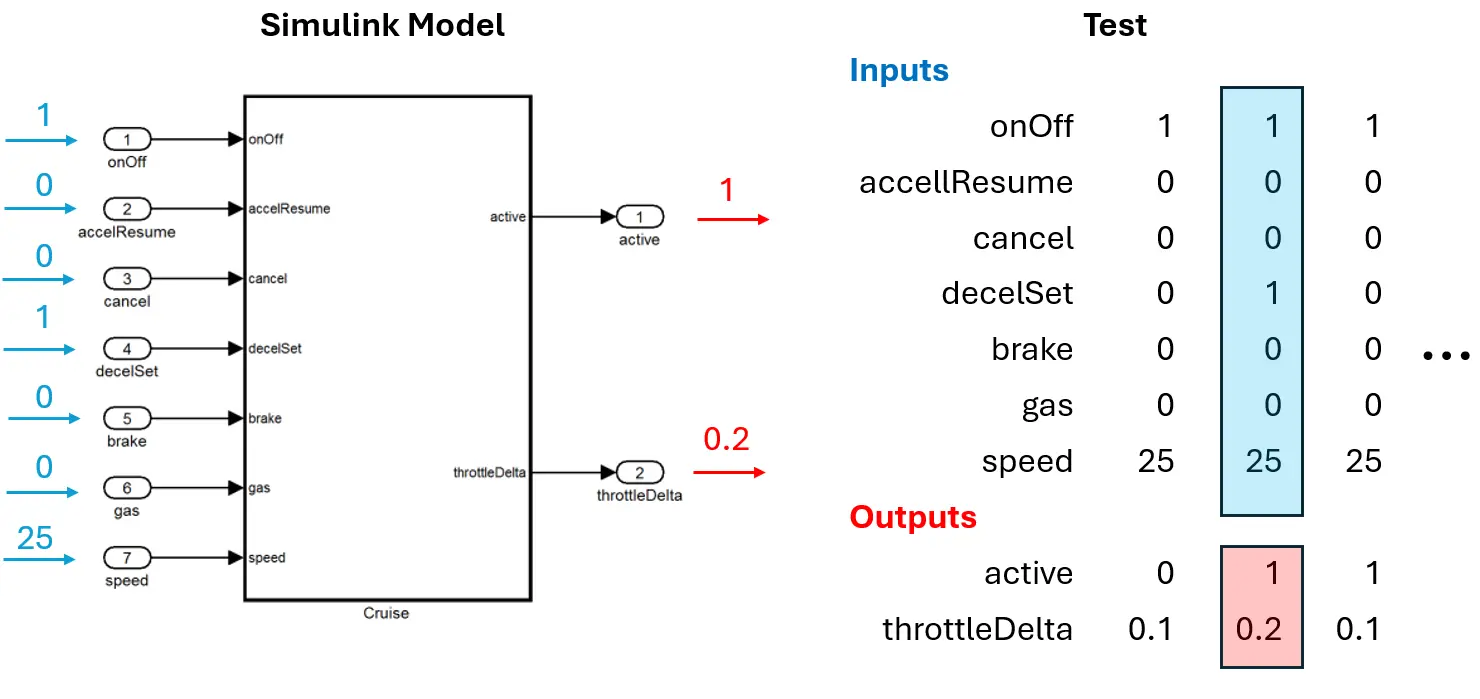
Fig. 2.3 Structure of a Reactis-generated test.#
Test suites are constructed by simulating a model and recording the input and output values at each step. The model computes the outputs at each step, but several approaches are possible for selecting the input values to drive simulation. The input data could be captured during field testing or constructed manually by an engineer. If such data is available, it can be imported into Reactis from a comma separated value (CSV) file. Alternatively, the inputs could be generated randomly; however, this approach yields tests with poor coverage.
Reactis Tester employs a patented technique called guided simulation to generate quality input data automatically. The idea behind this approach is to use algorithms and heuristics to automatically generate inputs that cause coverage targets (i.e. model elements that the user wants to ensure are executed at least once) that have not yet been covered to be executed. Reactis currently allows you to track several different classes of coverage targets (also called coverage criteria or coverage metrics). Some of the test coverage metrics supported by Reactis involve only Simulink, some are specific to Stateflow, and the remaining are generic in the sense that they include targets within the Simulink, Stateflow, C code, or Embedded MATLAB portions of a model.
- Simulink-specific
Conditional subsystems. Branches of the following blocks: Dead Zone, Logical Operator, MinMax, Multiport Switch, Relational Operator, Saturation, Switch. Lookup table elements.
- Stateflow-specific
States. Condition actions. Transition actions. Child State Exit via Parent Transition (CSEPT).
- Generic
Decisions from logic blocks in Simulink, transition segments in Stateflow, or in C or Embedded MATLAB code are boolean-valued expressions used to determine which execution path to follow. Conditions (the atomic predicates that are the building blocks of decisions). Modified Condition/Decision Coverage (MC/DC) targets. Multiple Condition Coverage (MCC) targets. Boundary Values of top-level inputs.
2.2. Reactis Simulator#
Reactis Simulator enables you to visualize model execution and debug Simulink models. Simulator’s user interface is similar to those of traditional debuggers for programming languages: it allows you to step through the execution of models by hand as well as set break points. Simulator also supports reverse execution, the replay of tests generated by Reactis Tester, the graphical display of different coverage metrics, the display of data item values, and the capability to fine-tune automatically generated test suites. Stepping between the Simulink, Stateflow, C code, and Embedded MATLAB portions of a model is seamless.
2.3. Reactis Validator#
Reactis Validator performs automated searches of models for violations of user-specified requirements. If Validator finds a violation, it returns a test that leads to the problem. This test may then be executed in Reactis Simulator to gain an understanding of the sequence of events that leads to the problem. Validator enables the early detection of design errors and inconsistencies and reduces the effort required for design reviews. Some checks that may be performed with Validator include the following.
Will a car’s brake pedal always deactivate the cruise-control?
Will a plane’s thrust reversers ever engage when the aircraft is airborne?
Will a medical device ever deliver an unsafe dose of radiation?